
Vietnam-Vintage Vehicles Blaze Trail For Robot Tanks: Army RCV
Posted on

Robotic M113 armored vehicle (with human monitor aboard for safety) at Camp Grayling in 2017
Right now, the Army is converting four of its most outdated armored vehicles into experimental combat robots. Workers are outfitting the obsolete M113 — a lightly armored box on tracks which first saw action in Vietnam — with cutting-edge autonomy kits to let it operate without a human onboard. These “surrogate Robotic Combat Vehicles” will test technology and tactics for the robotic mini-tanks the Army wants by the mid-2020s.

Army M113 in Vietnam
The unmanned M113s are a first step, not the Terminator. At least initially, after they finish safety certification and enter field-testing in late 2019, soldiers will fire their weapons and drive them around obstacles by remote control. But even at the start, the M113s will have the digital smarts to follow a manned vehicle on command, repurposing software and sensors developed for robotic supply trucks, which in turn build on commercial breakthroughs in self-driving cars.
The actual Robotic Combat Vehicle that gets mass-produced and fielded by 2028 will be an all-new design, not a converted M113. But why wait for someone to design and build the perfect hardware, when you can start testing the software and the tactics on something cheaply available today? For that matter, how could you design and build the perfect hardware without first getting real soldiers’ feedback on prototypes in field conditions?
“We don’t want to make big bets and be wrong,” said Kevin Mills, TARDEC’s associate director for ground robots.
“You can do a lot in simulation, you can do a lot in analysis,” Mills told me this morning. But to really figure out whether your software works in the field, let alone how soldiers might use it in combat, he said, “it’s not something you can do on paper. You really have to start prototyping and experimentation.”

Army soldiers and primitive M2 tanks during the Louisiana Maneuvers, 1941
The New Louisiana Maneuvers
“In the last year or two, there’s been a tidal shift in terms of the armed robotic experimentation efforts,” Mills told me. “(There’s) really strong leadership from the chief on down that desires the Army to have experimentation going on, prototyping going on, (to learn) how we’re going to fight these new systems….or learn that they’re not ready yet and go back to development.”
Army Secretary Mark Esper and Chief of Staff Mark Milley have made clear they want armed robots fighting alongside traditional manned vehicles as soon as possible. The robots won’t replace humans, but they can take on dangerous missions like scouting ahead, decoying enemy fire, and setting off ambushes, so the humans suffer fewer casualties. Army futurists see this manned-unmanned teaming as a vital advantage in a future ground war. It’s especially useful against the rapidly modernizing Russian army, which not only has more armored vehicles than the US but a growing array of experimental robots — today.

Kevin Mills
“They want that future sooner and they don’t want to wait for a perfect solution,” Mills said. “Get on with it and start experimenting…. Get something in soldiers’ hands, we know it ‘s not going to be perfect.”
The analogy, Mills said, is the historic Louisiana Maneuvers of 1941, held between the Nazi conquest of France and the Japanese attack on Pearl Harbor. The Army had so few armored vehicles that it resorted to painting “TANK” on the side of trucks. Those tanks the Army did have were mostly primitive designs that ended up never being used in battle, because they were so acutely inferior to both European contemporaries and the M4 Shermans that would be the American mainstay in the war.
But these crude surrogates allowed the US Army to experiment with radically new tactics. That included a three-day, 200-mile flanking maneuver that paralyzed the defenders and made the name of attacking commander George S. Patton. As a result, when the “arsenal of democracy” delivered decent tanks, the Army already had some idea how to use them.
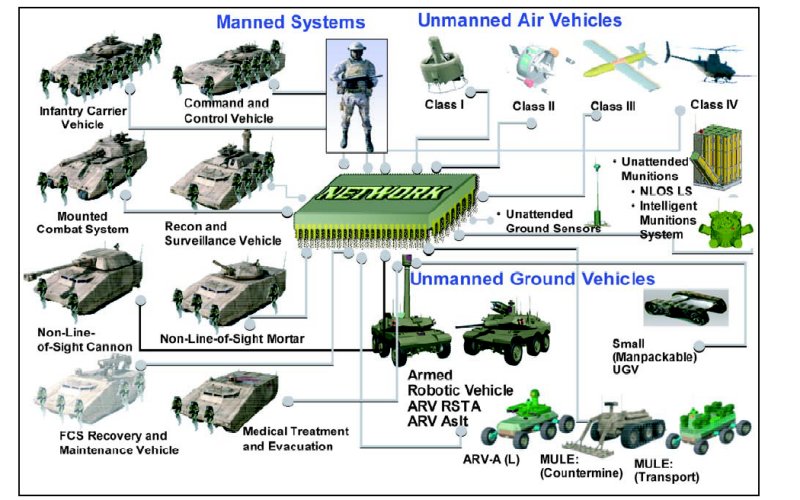
Army slide showing the elements of the (later canceled) Future Combat System
FCS: The Enemy Of Good Enough
The Louisiana Maneuvers-style crawl-walk-run approach is a stark contrast from the cancelled Future Combat Systems, which Mills worked out when he started at TARDEC fresh out of the University of Michigan in 2002.
FCS “was the last large push the Army had for significant robotic capability,” Mills recalled. The problem? “We were going for an exquisite system that solved all the challenges.”
The FCS’s “big bang” approach” tried to solve everything at once. That included developing a new battlefield wireless network to share orders and intelligence, a new family of manned armored vehicles, and an arsenal of unmanned systems from static sensors to cargo haulers to heavily armed mini-tanks. All told, a total of 19 systems were being invented at the same time, on a deadline, by a single mega-team of companies on a single huge contract — using early-2000s technology.

Army HEMTT truck converted to a self-driving “leader follower” vehicle at TARDEC (Tank-Automotive Research, Development, & Engineering Command) in Warren Mich..
Today, by contrast, the Army is taking a step by step approach. It’ll field unmanned supply trucks that can follow human drivers in convoy — the Leader Follower program — before it introduces a Robotic Combat Vehicle. And even with RCV, they’re starting with limited capabilities and upgrading over time as technology advances and soldiers make suggestions, with opportunities for multiple companies to compete at every stage.
Rather than take years trying to “guess at the perfect” in a vacuum as FCS did, Mills said, the plan is to start experimenting with the imperfect as soon as possible. Then you contract with whoever has the best technology right now to make frequent upgrades — by swiftly updating software, not laboriously rebuilding hardware.
What’s more, rather than rely on a single contractor’s software that only runs on that company’s proprietary hardware, the Army’s creating a set of common standards available to any company. This kind of modular open architecture lets you can buy specific solutions from any company whose products meet those standards. Just like any vendor can make apps for the iPhone’s IOS, any company will be able to make software modules for the Army’s Robotic Operating System – Military (ROS-M).
How the Army plans to evolve this software step by step, turning the venerable M113 into a futuristic Robotic Combat Vehicle, is the subject of Part II, out tomorrow.
[Click here to read Part II: From Google Cars To Robot Tanks]